自动驾驶技术入门,先看平台
近年来,自动化驾驶的话题越来越成为热点。对于国内接触过自动驾驶技术以及想进入相关行业的开发者而言,大多数都听说过、或者使用过百度Apoolo开放平台,开发者可以在平台上获取到模型资源、最新算法等资料,同时也能接触到一些领域的大咖。总的来说,是一个对开发者比较友好的自动驾驶技术平台。
12月28号,百度新推出了这个平台的升级版——Apoolo开放平台8.0,据说在平台的易用性和实用性上带来了一些升级,今天我们就一起来探索一下。
Appllo主要优势
Applo是一个开放、完整安全的自动化平台,开发者可以基于它构建自己的自动驾驶系统。在这里可以直接使用百度的高精度地图服务,还有多种共享的自动化驾驶算法。可以预期的是,随着参与者越多,积累的行驶数据越多,平台也会更加的成熟,持续反馈,持续迭代,持续升级。
版本更新新特性
颠覆更新“新”架构

百度Apollo开放平台8.0架构从之前的以软件为中心的技术分层架构,升级到了融合智能驾驶生态体系的全方位新架构,强化了针对具体场景的整体解决方案的剔除,更加方便我们依据自身实际需求进行方案的架构的选型,带来开箱即用的设计思路,提高软件设计效率。
在基础设施(Iass)层面融合了之前的硬件和车辆层级,在新架构中整合成为新的硬件设备层。在此层级中更加注重标准协议的制定,我们可以因此使用各种符合标准规范认证的硬件,同时做相关硬件的开发者也可以根据相应的标准协议就可以方便完成自定义设备的接入。日后能够成为事实硬件协议规范,从而方便我们所有参与者。
在类似于(Pass)层面的软件核心层,提供完成智能驾驶服务搭建的基础软件服务。作为智能驾驶平台,最重要的一环就是感知能力,此次Apollo开放平台8.0升级主要加强了平台的感知能力,这极大的提高了我们软件的竞争力,增强了我们平台的能力。同时PnC的仿真能力也进行了提高,这让我们可以模拟更加真实的环境,在试车前发现更多问题。
全新架构新增了软件应用层,以场景化的形式展现了自动驾驶的模块扩展功能。我们能够根据自身使用需求和真实场景挑选相近的场景解决方案,进行少量修改即可完成我们最终的软件架构,实现快速解决实际问题并达到非常好的解决效果。
最上层的云端服务层,新增了实训、模型训练模块,着重强化了仿真能力。帮助我们在模拟环境中尽量还原真实,在实际真实测试前发现更多问题,降低调试成本。
全新加入软件包管理机制
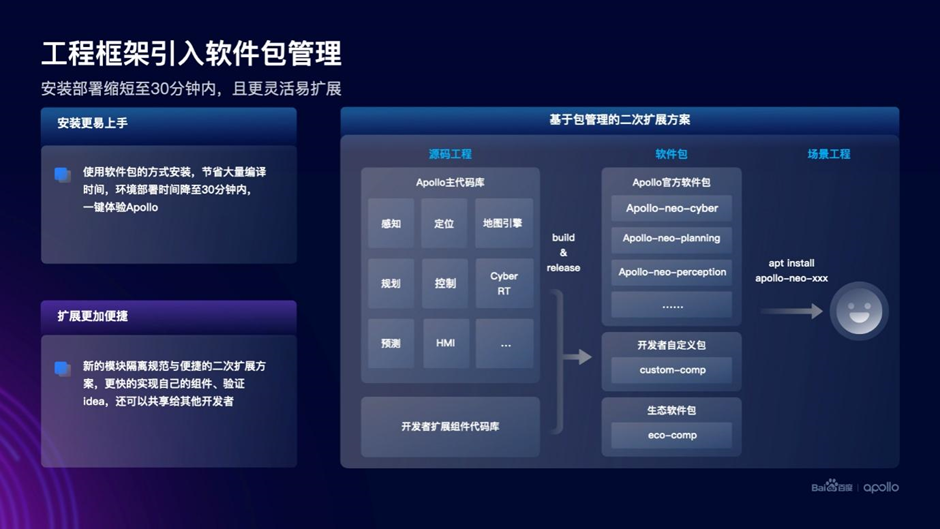
Apollo开放平台8.0新增了类似于ubuntu中apt的包管理器。这能极大的节约我们在安装、调试、使用中的时间。
在之前的版本,我们需要下载完整的源码,然后进行编译安装,这通常需要花费非常久的时间,并且需要解决依赖冲突问题,这通常是令人崩溃的。而拥有了软件包管理器,我们就可以直接下载安装已经编译好的二进制文件,同时自动解析依赖,可以让我们感受到一键安装体验Apollo的畅快感,极大节省了我们的部署时间,减少我们调试环境的精力消耗,更加专注于解决方案的提出和优化中。
并且新增了包管理的二次扩展方案,也就是能够实现自定义包和原始代码包的组合来实现各种复杂的场景。这样我们在有类似于之前的需求场景时,只需要下载之前场景打包好的一整套解决方案,进行非常少量的修改即可适配新的类似场景需求,避免了大量重复工作,极大提升了我们的工作效率。
加入新感知模型
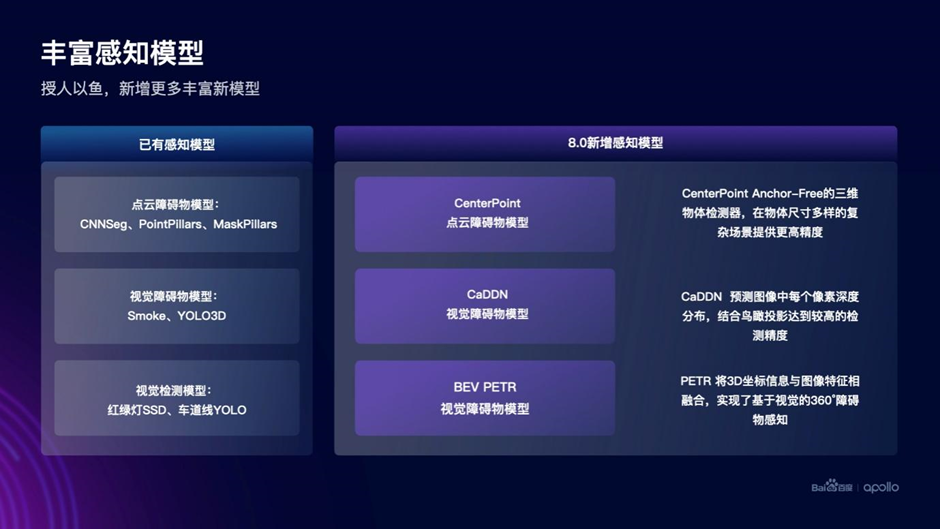
Apollo之前已经拥有了非常丰富的感知模型,为了提高模型精度、降低模型的使用难度以及提升系统整体感知能力,增强系统的实用性,Apollo开放平台8.0新增了三个感知模型。
在Lidar感知方面,新增了不需要认为设置Anchor尺寸的CenterPoint点云障碍物模型,能够提供相比于之前检测方式在复杂场景下更高精度的检测结果。我们利用这个模型可以降低我们对模型调参的时间,并且提高我们的感知效果,节约时间的同时加强效果,可谓一个神器。
在Camera感知上,新增了CaDDN视觉障碍物模型,预测图中物体的深度分布,结合了鸟瞰投影图进行识别,实现了相对之前模型更高精度的检测能力。同时新增了视觉BEV感知模型PETR,将3D坐标信息和图像特征相融合,吸纳了基于视觉的360°障碍物感知,扩展了系统的感知能力。我们使用这个新的感知模型能够在不降低识别效率的前提下,完成融合深度的全方位感知信息,可以极大提高了我们系统的感知能力,完成更加具有挑战性的操作。
感知全流程开放与提效
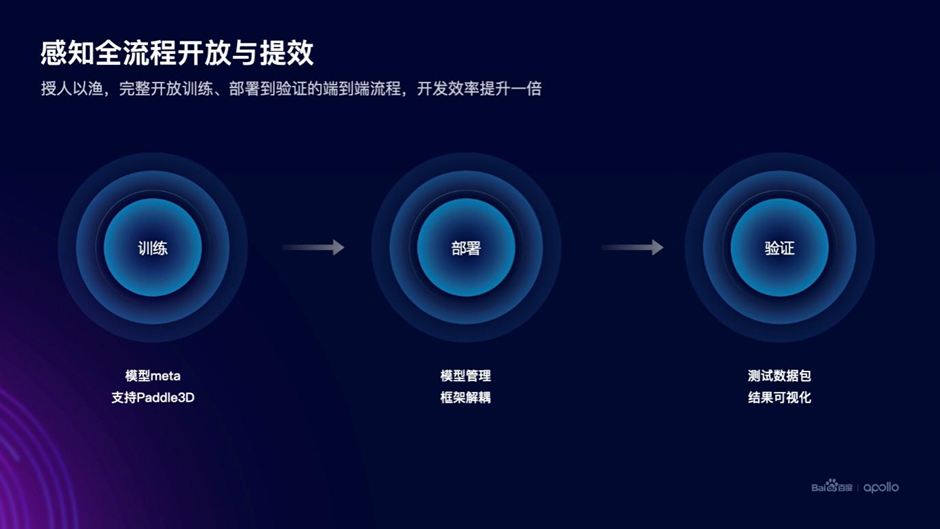
这里很值得一提的还有,Apollo为了适应更多的场景,开放了感知流程的开发环节,让我们能够根据自己的真实需求进行模型的快速、标准化开发。
在模型训练阶段,支持Paddle3D,为我们提供巨量的参考模型,同时引入模型meta信息,规范模型预处理、输入、输出等信息。也就是进行模型输入输出的规范化管理。这些技术能够让我们以规范化的操作快速接入现有架构,提升我们开发模型的效率,同时大量的参考模型可以给予我们更多的制作思路,能够创造出更加紧跟趋势的新模型。
在验证阶段,平台提供模型管理工具,同时基于前面规范的meta信息,我们可以轻松实现现有架构的接入。这些减少了我们在部署模型的时间花费,让我们可以实现快速部署,甚至实现一键部署,极大降低了部署时间花销,提高效率。
在验证阶段,基于平台自带的测试数据包,可以完成标准化的测试对比。同时平台提供的可视化工具可以让我们更加方便的查看结果以及对外进行效果展示。这让我们能够快速对所创建模型进行标准化评估,并且能够将数据可视化呈现,方便我们做模型总结时的数据支撑,提高我们自身的数据表现力和核心竞争力。
全新PnC工具链
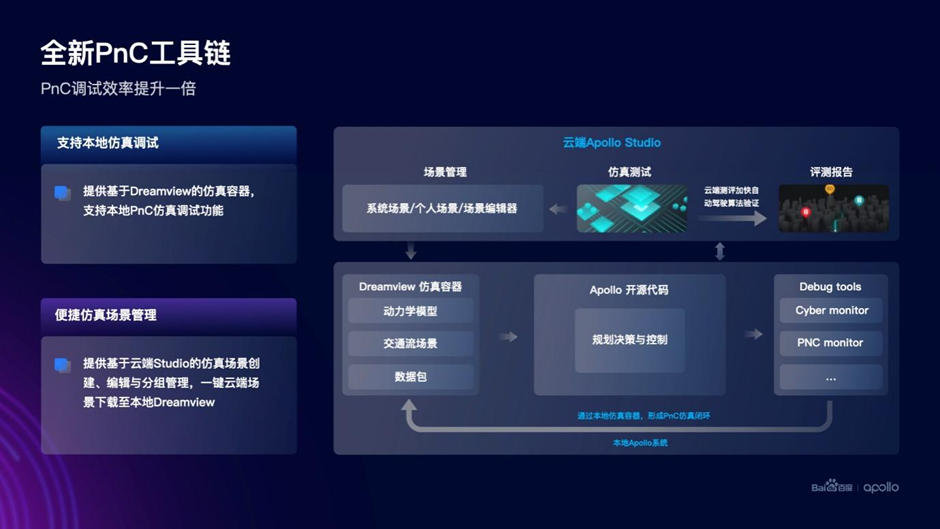
在Apollo面向的自动驾驶行业,真实场景的测试也就是试车成本非常昂贵,不仅体现在车辆的制作还有场景的搭建,其中都伴随着高成本、高风险以及低效率。所以仿真测试能力成为很多企业非常看重的一个点。
而Apollo全新的PnC仿真工具新增了本地仿真的支持,本地通过Dreamview的仿真器模拟车辆行驶以及再现各种场景。这样我们可以使用本地服务器进行仿真器的搭建,保护我们业务代码数据的安全,同时本地化的低延时优势能够让我们快速拿到结果,仿真不再等待。
同时提供了非常便捷的场景管理,其基于云端丰富的资源,新增了Studio插件能够将云端搭建好的场景和动力学模型下载到本地进行仿真。这样我们可以利用云端丰富的场景资源模拟更加真实的环境,同时减少我们查找相关模型的时间,提高我们的仿真效率的同时在仿真阶段发现更多问题,真实环境更少问题,不再追车找问题。
写在最后
在自动驾驶不断发展的今天,百度以Apollo平台入手,实现了全无人自动驾驶的运营、大规模的人才培养以及更简便的平台搭建,我们可以快速轻松的学习,提前进入下一个热点方向。
Apollo开放平台8.0发布后,还新上线了一个Apollo Studio的全新社区,为想更多了解学习自动驾驶相关技术的开发者带来更多学习资源、交流平台以及更重要的实践机会,赶兴趣的朋友们可以点击链接围观一下:https://apollo.baidu.com/
